摘要:

本章介绍了二叉查找树的概念及操作。主要内容包括二叉查找树的性质,如何在二叉查找树中查找最大值、最小值和给定的值,如何找出某一个元素的前驱和后继,如何在二叉查找树中进行插入和删除操作。在二叉查找树上执行这些基本操作的时间与树的高度成正比,一棵随机构造的二叉查找树的期望高度为O(lgn),从而基本动态集合的操作平均时间为θ(lgn)。
1、二叉查找树
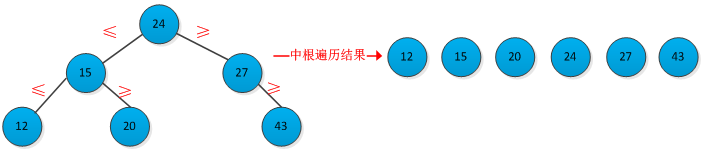
二叉查找树是按照二叉树结构来组织的,因此可以用二叉链表结构表示。二叉查找树中的关键字的存储方式满足的特征是:设x为二叉查找树中的一个结点。如果y是x的左子树中的一个结点,则key[y]≤key[x]。如果y是x的右子树中的一个结点,则key[x]≤key[y]。根据二叉查找树的特征可知,采用中根遍历一棵二叉查找树,可以得到树中关键字有小到大的序列。一棵二叉树查找及其中根遍历结果如下图所示:
书中给出了一个定理:如果x是一棵包含n个结点的子树的根,则其中根遍历运行时间为θ(n)。
问题:二叉查找树性质与最小堆之间有什么区别?能否利用最小堆的性质在O(n)时间内,按序输出含有n个结点的树中的所有关键字?
2、查询二叉查找树
二叉查找树中最常见的操作是查找树中的某个关键字,除了基本的查询,还支持最大值、最小值、前驱和后继查询操作,书中就每种查询进行了详细的讲解。
(1)查找SEARCH
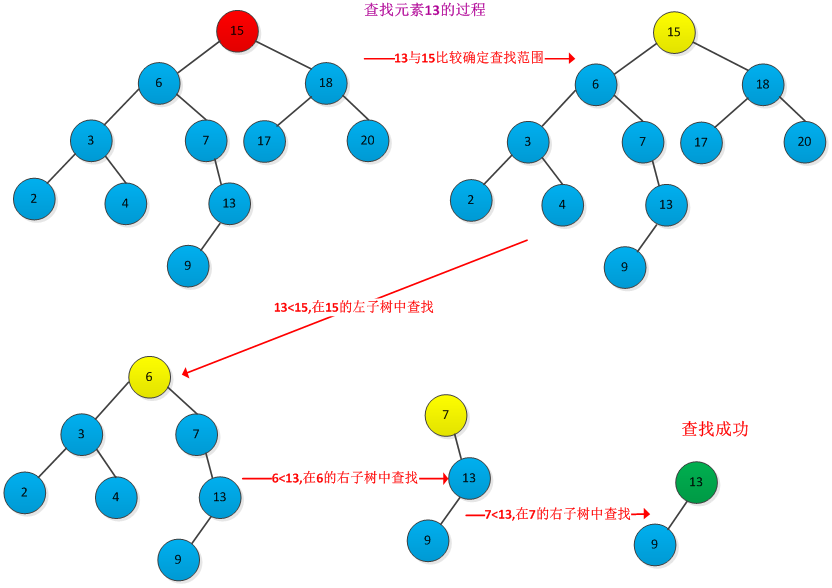
在二叉查找树中查找一个给定的关键字k的过程与二分查找很类似,根据二叉查找树在的关键字存放的特征,很容易得出查找过程:首先是关键字k与树根的关键字进行比较,如果k大比根的关键字大,则在根的右子树中查找,否则在根的左子树中查找,重复此过程,直到找到与遇到空结点为止。例如下图所示的查找关键字13的过程:(查找过程每次在左右子树中做出选择,减少一半的工作量)
书中给出了查找过程的递归和非递归形式的伪代码:
(2)查找最大关键字和最小关键字
根据二叉查找树的特征,很容易查找出最大和最小关键字。查找二叉树中的最小关键字:从根结点开始,沿着各个节点的left指针查找下去,直到遇到NULL时结束。如果一个结点x无左子树,则以x为根的子树中,最小关键字就是key[x]。查找二叉树中的最大关键字:从根结点开始,沿着各个结点的right指针查找下去,直到遇到NULL时结束。书中给出了查找最大最小关键字的伪代码:
(3)前驱和后继
给定一个二叉查找树中的结点,找出在中序遍历顺序下某个节点的前驱和后继。如果树中所有关键字都不相同,则某一结点x的前驱就是小于key[x]的所有关键字中最大的那个结点,后继即是大于key[x]中的所有关键字中最小的那个结点。根据二叉查找树的结构和性质,不用对关键字做任何比较,就可以找到某个结点的前驱和后继。
查找前驱步骤:先判断x是否有左子树,如果有则在left[x]中查找关键字最大的结点,即是x的前驱。如果没有左子树,则从x继续向上执行此操作,直到遇到某个结点是其父节点的右孩子结点。例如下图查找结点7的前驱结点6过程: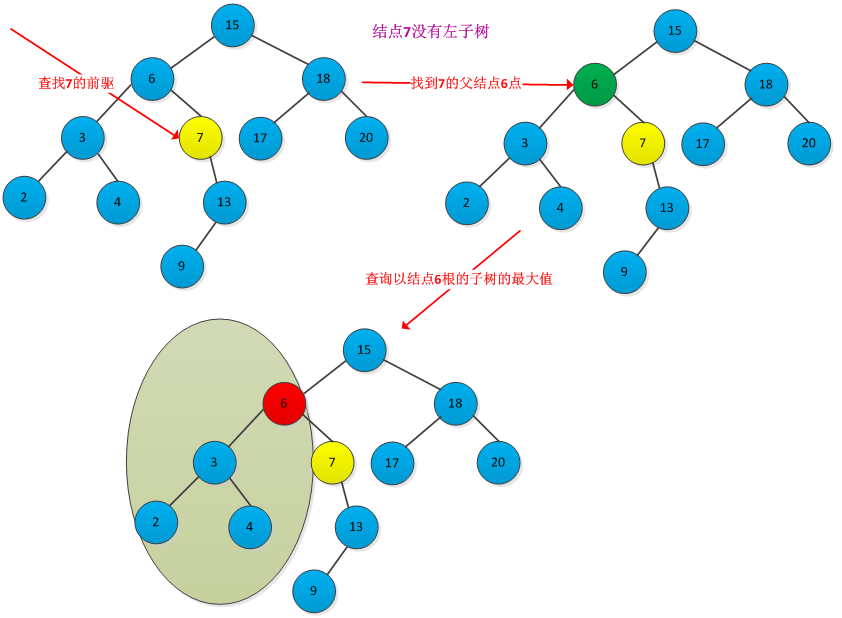
查找后继步骤:先判断x是否有右子树,如果有则在right[x]中查找关键字最小的结点,即使x的后继。如果没有右子树,则从x的父节点开始向上查找,直到遇到某个结点是其父结点的左儿子的结点时为止。例如下图查找结点13的后继结点15的过程: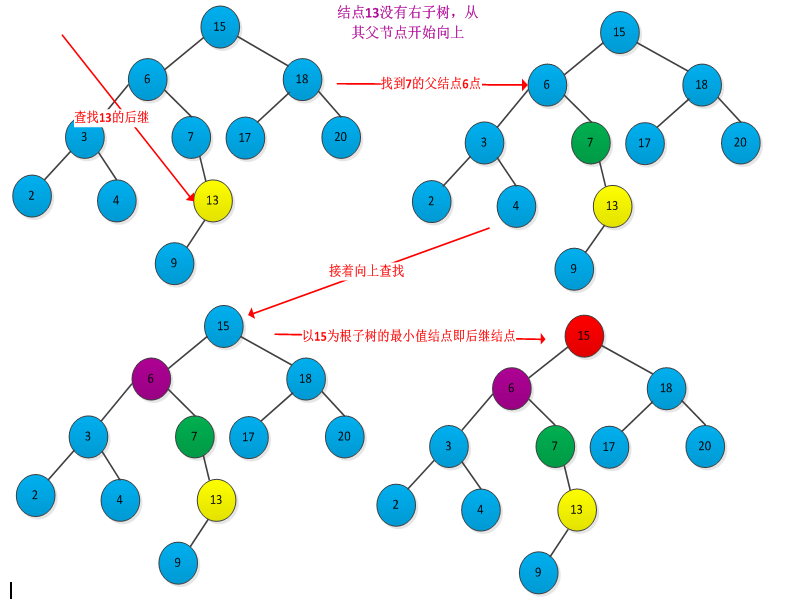
书中给出了求x结点后继结点的伪代码:
定理:对一棵高度为h的二叉查找,动态集合操作SEARCH、MINMUM、MAXMUM、SUCCESSOR、PROCESSOR等的运行时间均为O(h)。
3、插入和删除
插入和删除会引起二叉查找表示的动态集合的变化,难点在在插入和删除的过程中要保持二叉查找树的性质。插入过程相当来说要简单一些,删除结点比较复杂。
(1)插入
插入结点的位置对应着查找过程中查找不成功时候的结点位置,因此需要从根结点开始查找带插入结点位置,找到位置后插入即可。下图所示插入结点过程:
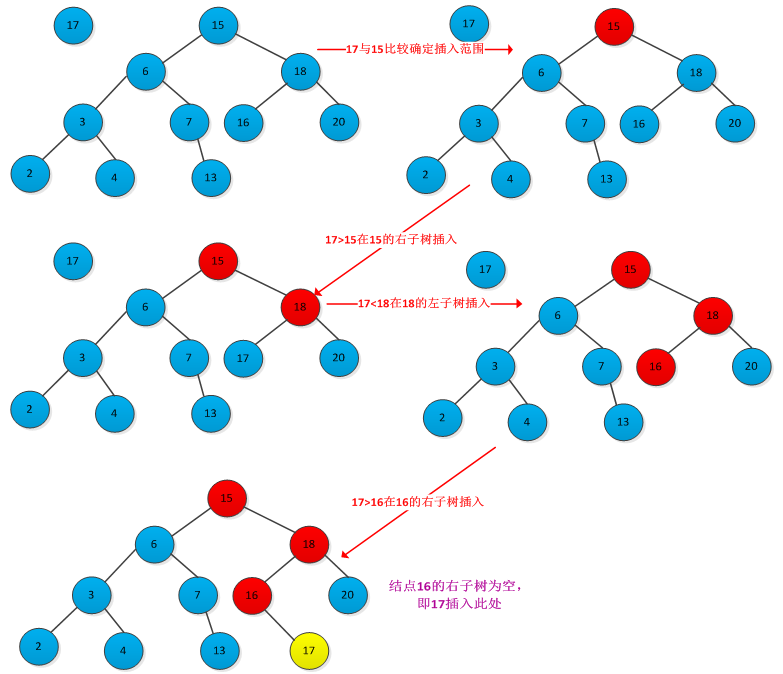
书中给出了插入过程的伪代码:
插入过程运行时间为O(h),h为树的高度。
(2)删除
从二叉查找树中删除给定的结点z,分三种情况讨论:
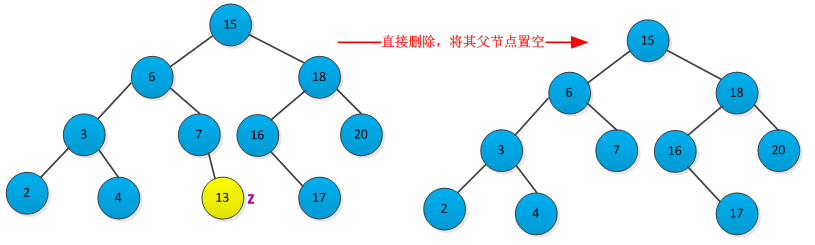
<1>结点z没有左右子树,则修改其父节点p[z],使其为NULL。删除过程如下图所示:
<2>如果结点z只有一个子树(左子树或者右子树),通过在其子结点与父节点建立一条链来删除z。删除过程如下图所示: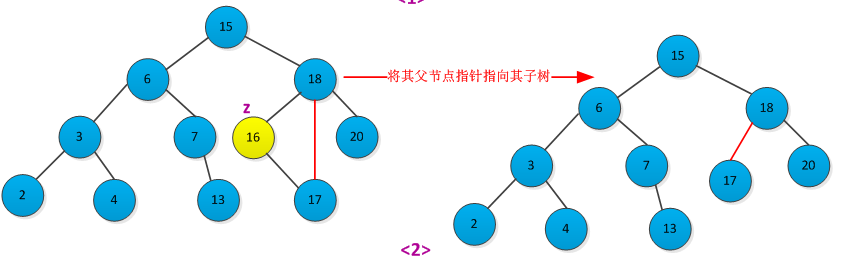
<3>如果z有两个子女,则先删除z的后继y(y没有左孩子),在用y的内容来替代z的内容。
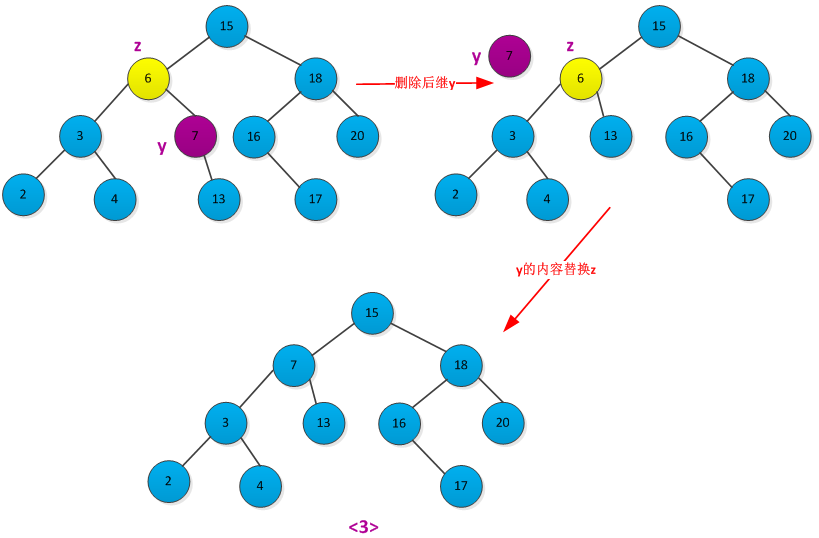
书中给出了删除过程的伪代码:
定理:对高度为h的二叉查找树,动态集合操作INSERT和DELETE的运行时间为O(h)。
1、前言:
接着学习动态规划方法,最优二叉查找树问题。如果在二叉树中查找元素不考虑概率及查找不成功的情况下,可以采用红黑树或者平衡二叉树来搜索,这样可以在O(lgn)时间内完成。而现实生活中,查找的关键字是有一定的概率的,就是说有的关键字可能经常被搜索,而有的很少被搜索,而且搜索的关键字可能不存在,为此需要根据关键字出现的概率构建一个二叉树。比如中文输入法字库中各词条(单字、词组等)的先验概率,针对用户习惯可以自动调整词频——所谓动态调频、高频先现原则,以减少用户翻查次数,使得经常用的词汇被放置在前面,这样就能有效地加快查找速度。这就是最优二叉树所要解决的问题。
2、问题描述
给定一个由n个互异的关键字组成的有序序列K={k1<k2<k3<,……,<kn}和它们被查询的概率P={p1,p2,p3,……,pn},要求构造一棵二叉查找树T,使得查询所有元素的总的代价最小。对于一个搜索树,当搜索的元素在树内时,表示搜索成功。当不在树内时,表示搜索失败,用一个“虚叶子节点”来标示搜索失败的情况,因此需要n+1个虚叶子节点{d0<d1<……<dn},对于应di的概率序列是Q={q0,q1,……,qn}。其中d0表示搜索元素小于k1的失败结果,dn表示搜索元素大于kn的失败情况。di(0<i<n)表示搜索节点在ki和k(i+1)之间时的失败情况。因此有如下公式:

由每个关键字和每个虚拟键被搜索的概率,可以确定在一棵给定的二叉查找树T内一次搜索的期望代价。设一次搜索的实际代价为检查的节点个数,即在T内搜索所发现的节点的深度加上1。所以在T内一次搜索的期望代价为:
需要注意的是:一棵最优二叉查找树不一定是一棵整体高度最小的树,也不一定总是把最大概率的关键字放在根部。
(3)动态规划求解过程
1)最优二叉查找树的结构
如果一棵最优二叉查找树T有一棵包含关键字ki,……,kj的子树T',那么这棵子树T’对于对于关键字ki,……kj和虚拟键di-1,……,dj的子问题也必定是最优的。
2)一个递归解
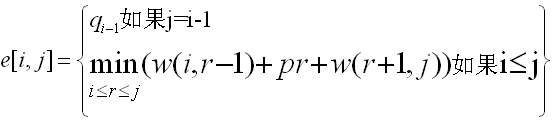
定义e[i,j]为搜索一棵包含关键字ki,……,kj的最优二叉查找树的期望代价,则分类讨论如下:
当j=i-1时,说明此时只有虚拟键di-1,故e[i,i-1] = qi-1
当j≥i时,需要从ki,……,kj中选择一个跟kr,然后用关键字ki,……,kr-1来构造一棵最优二叉查找树作为左子树,用关键字kr+1,……,kj来构造一棵最优二叉查找树作为右子树。定义一棵有关键字ki,……,kj的子树,定义概率的总和为:

因此如果kr是一棵包含关键字ki,……,kj的最优子树的根,则有:


故e[i,j]重写为:
![]()
最终的递归式如下:
3)计算一棵最优二叉查找树的期望搜索代价
将e[i,j]的值保存到一个二维数组e[1..1+n,0..n]中,用root[i,j]来记录关键字ki,……,kj的子树的根,采用二维数组root[1..n,1..n]来表示。为了提高效率,防止重复计算,需要个二维数组w[1..n+1,0...n]来保存w(i,j)的值,其中w[i,j] = w[i,j-1]+pj+qj。数组给出了计算过程的伪代码:
4)构造一棵最优二叉查找树
根据地第三步中得到的root表,可以递推出各个子树的根,从而可以构建出一棵最优二叉查找树。从root[1,n]开始向下递推,一次找出树根,及左子树和右子树。
4、编程实现
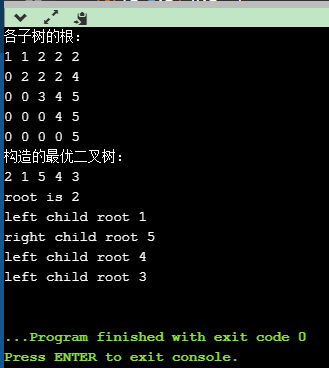
针对一个具体的实例编程实现,现在有5个关键字,其出现的概率P={0.15,0.10,0.05,0.10,0.20},查找虚拟键的概率q={0.05,0.10,0.05,0.05,0.05,0.10}。采用C++语言是实现如下:
运行结果: